|
|
He Sun 孙赫 I am an Assistant Professor of Biomedical Engineering at Peking University in Beijing, China. My research primarily focuses on AI for scientific imaging, which tightly integrates optics, control, signal processing and machine learning for scientific discoveries. Prior to starting at Peking University, I was a postdoctoral researcher and Amazon AI4Science Fellow at Caltech, where I mainly worked with Katie Bouman on black hole imaging. I received my Ph.D. in Mechanical and Aerospace Engineering from Princeton University in 2019 (advised by N. Jeremy Kasdin) and my bachelor’s degree in Engineering Mechanics and Economics from Peking University in 2014. Hiring: I have multiple Postdoc/PhD/MS/RA openings in my lab to work on computational imaging for Biomedicine and Astronomy. Please feel free to drop me an email (hesun at pku.edu.cn) if you are interested. |

News
- 06/2022: I am co-organizing the IEEE Computational Cameras and Displays (CCD) Workshop in CVPR 2022. Check out our website for the exciting program.
- 05/2022: EHT announced the first image of our galactic center black hole, SgrA*. Our alpha-DPI pipeline was utilized in its feature extraction analysis. Check Caltech News for more details.
- 05/2022: alpha-Deep Probabilistic Inference (alpha-DPI): efficient uncertainty quantification from exoplanet astrometry to black hole feature extraction accepted for publication in ApJ. [paper]
Featured Projects
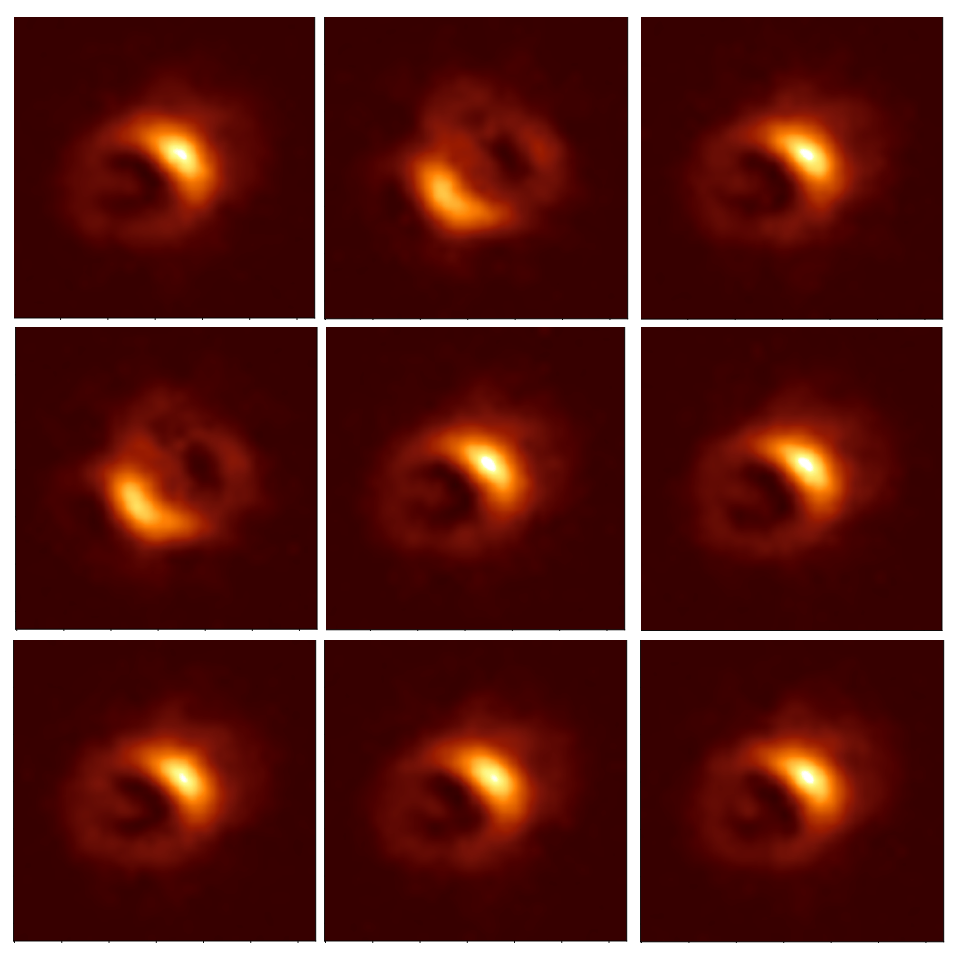 |
Computational Imaging
Computational imaging tightly integrates computational inference as part of the imaging systems to recover hidden signals from non-ideal measurements. My computational imaging research spans imaging hardware-software co-design, active data acquisition, deep learning inference algorithms, and uncertainty quantification, with an emphasis on their applications in astronomical and biomedical sciences.
|
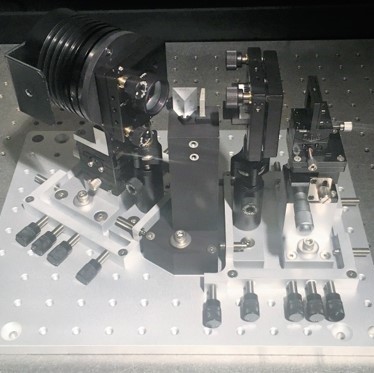 |
Adaptive Optics (AO)
Adaptive optics (AO) is a control system that removes the wavefront aberrations in optical systems. It is very important in the large telescopes for achieving high contrast imaging of Earth-like exoplanets. I work on the control algorithms and the spectrograph for space telescope AO.
|
Work Experience
- Assistant Professor, Peking University, May 2022 -Postdoctoral Researcher, California Institute of Technology, Oct 2019 - March 2022Research Intern, Mitsubishi Electric Research Laboratories (MERL), Jun-Sep 2018
Services
- Reviewer for IEEE Transactions on Image Processing (TIP), Optics Letter, IEEE/CAA Journal of Automatica Sinica, Journal of Astronomical Telescopes, Instruments and Systems (JATIS), Astronomy and Astrophysics (A&A), ICCV 2021, CVPR 2022, ECCV 2022, ICASSP 2020&2021&2022
- Program committee member of CCD-CVPR 2021/2022, LCI-ICCV 2021, MedNeurIPS 2021
- Member of the Committee on Caltech CMS Graduate Admissions, 2020-2022
- Member of the Priorities Committee (budgeting committee) of Princeton University, 2017-2018
Teaching
- Guest lecturer, Data-Driven Algorithms Design (CS 159), Caltech, Spring 2020
- Guest lecturer, Computational Cameras (CS/EE166), Caltech, Spring 2020&2021&2022
- Teaching assistant, Automatic Control System (MAE433), Princeton, Fall 2018
- Teaching assistant, Introduction to Engineering Dynamics (MAE206), Princeton, Spring 2018
- Teaching assistant, Space Flight, Princeton (MAE341), Fall 2017
- Teaching assistant, Mathematics in Engineering (MAE305/MAT391), Princeton, Fall 2016
Awards
- Best paper, Machine Learning for Health Conference (ML4H), 2021
- Amazon AI4Science Fellowship, California Institute of Technology, 2020
- Best paper for observation technologies and systems, IEEE Aerospace Conference, 2019
- Britt and Eli Harari Fellowship, Princeton University, 2018
- SEAS Award for Excellence, Princeton University, 2017
- ExxonMobil Scholarship, Peking University, 2013
- Scholarships for Students in Japan, JASSO, 2013
- Boeing Scholarship, Peking University, 2012
Selected Publications
PhD Thesis Efficient wavefront sensing and control for space-based high-contrast imaging
He Sun, Princeton University, 2019Computational Imaging alpha-Deep Probabilistic Inference (alpha-DPI): efficient uncertainty quantification from exoplanet astrometry to black hole feature extraction
He Sun, Katherine L. Bouman, Paul Tiede, Jason J. Wang, Sarah Blunt, Dimitri Mawet
Astrophysical Journal (ApJ), 2022End-to-End Sequential Sampling and Reconstruction for MR Imaging
Tianwei Yin*, Zihui Wu*, He Sun, Adrian V. Dalca, Yisong Yue, Katherine L. Bouman
Machine Learning for Health Conference (ML4H), 2021, Best Paper [code] [webpage]Deep Probabilistic Imaging: uncertainty quantification and multi-modal solution characterization for computational imaging
He Sun, Katherine L. Bouman
AAAI Conference on Artificial Intelligence (AAAI), 2021 [code] [webpage]Learning a probabilistic strategy for computational imaging sensor selection
He Sun, Adrian V. Dalca, Katherine L. Bouman
International Conference on Computational Photography (ICCP), 2020 [code] [webpage]Adaptive Optics and Spectroscopy High-Contrast Integral Field Spectrograph (HCIFS): multi-spectral wavefront control and reduced-dimensional system identification
He Sun, Alexei Goun, Susan Redmond, Michael Galvin, Tyler Groff, Maxime Rizzo, and N. Jeremy Kasdin
Optics Express, 2020
Efficient wavefront sensing for space-based adaptive optics
He Sun, N. Jeremy Kasdin, Robert Vanderbei
Journal of Astronomical Telescopes, Instruments, and Systems, 2020Modern wavefront control for space-based exoplanet coronagraph imaging
He Sun, Jessica Gersh-Range, N. Jeremy Kasdin
IEEE Aerospace Conference, 2019, Track Best Paper
Identification and adaptive control of a high-contrast focal plane wavefront correction system
He Sun, N. Jeremy Kasdin, Robert Vanderbei
Journal of Astronomical Telescopes, Instruments, and Systems, 2018 [code]
Astronomical Image Processing Bernoulli generalized likelihood ratio test for signal detection from photon counting images
Mengya Hu, He Sun, Anthony Harness, N. Jeremy Kasdin
Journal of Astronomical Telescopes, Instruments, and Systems, 2021
Exoplanet detection in starshade images
Mengya Hu, Anthony Harness, He Sun, N. Jeremy Kasdin
Journal of Astronomical Telescopes, Instruments, and Systems, 2021
Robot Motion Planning Learning heuristic for mobile robot path planning using deep neural network
Takeshi Takahashi, He Sun, Dong Tian, Yebin Wang
International Conference on Automated Planning and Scheduling (ICAPS), 2019
Last updated: by He Sun.